Research Fields
Optimal Control and Game Theory Applications
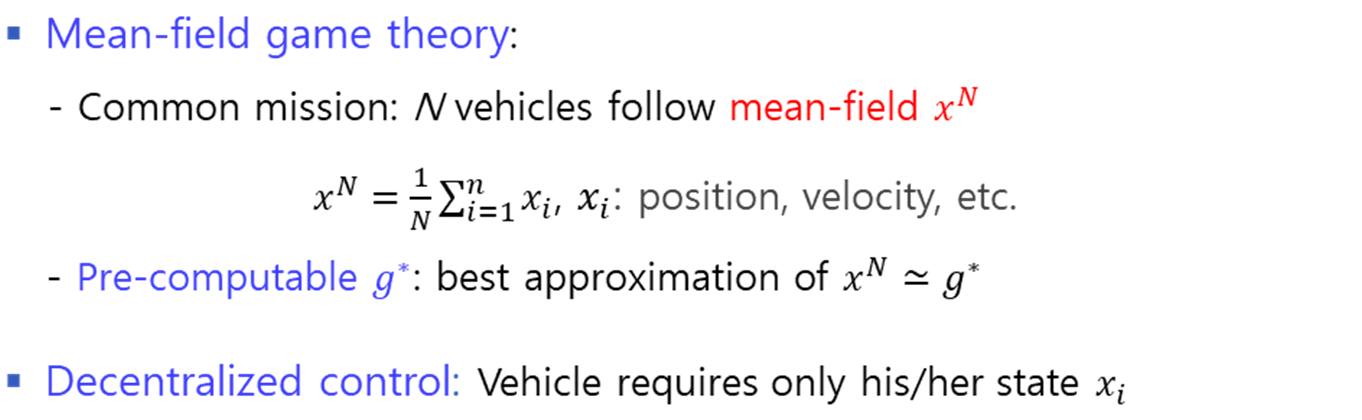
Control multiple agents in a decentralized manner through mean-field game theory, utilizing the pre-computed optimal strategy g*
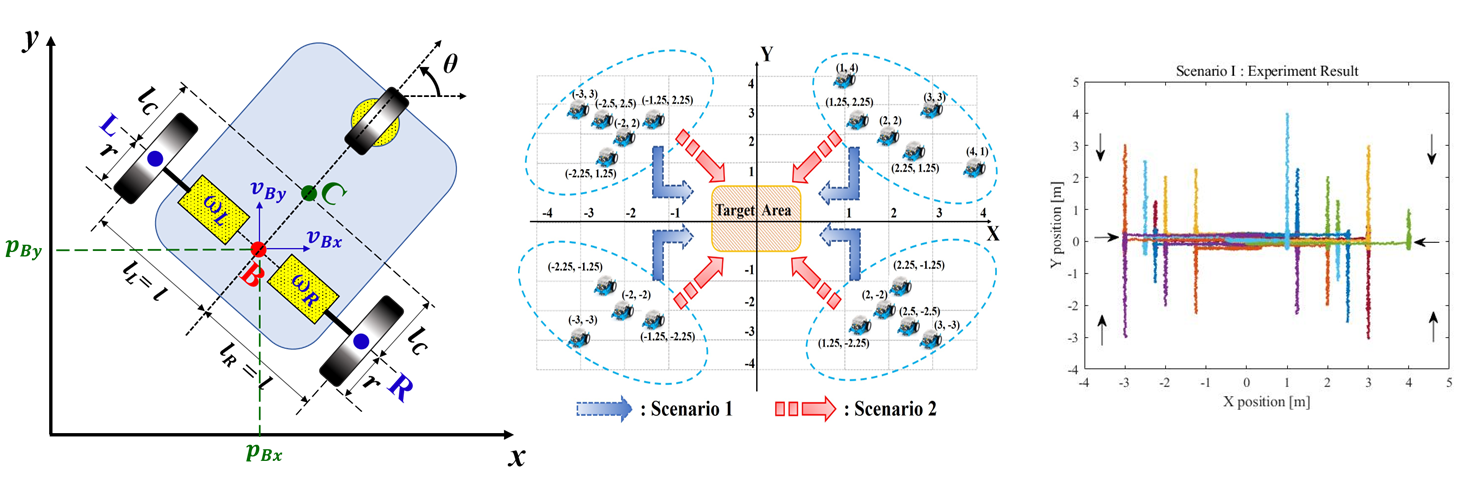
[Distributed Optimal Control of Two-Wheeled Unmanned Vehicles: Differential Game Approach]
Developed and applied mean-field differential game theory for distributed non-cooperative optimal control of partially observed large-scale two-wheeled unmanned vehicles

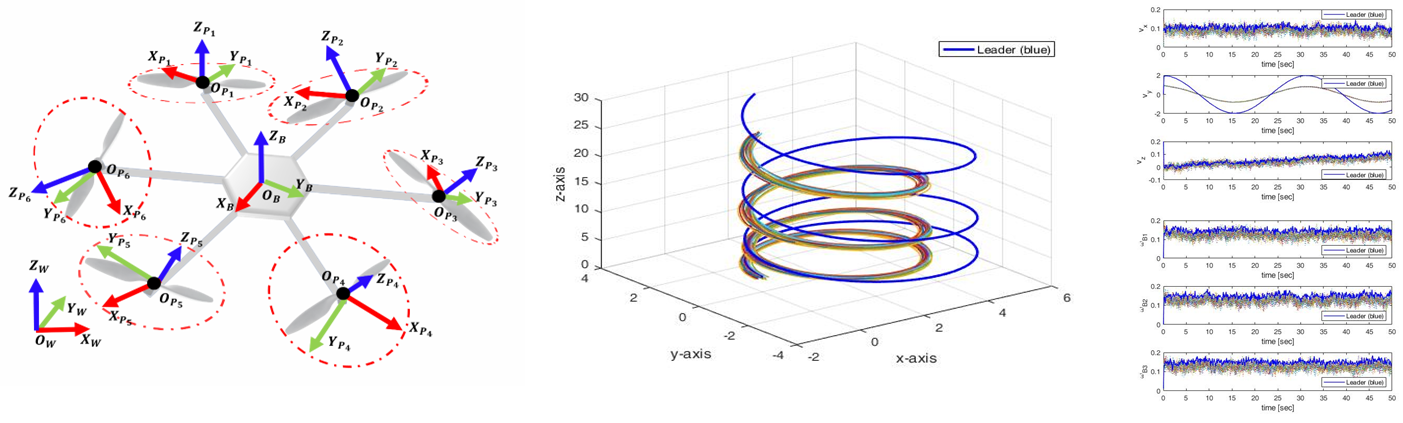
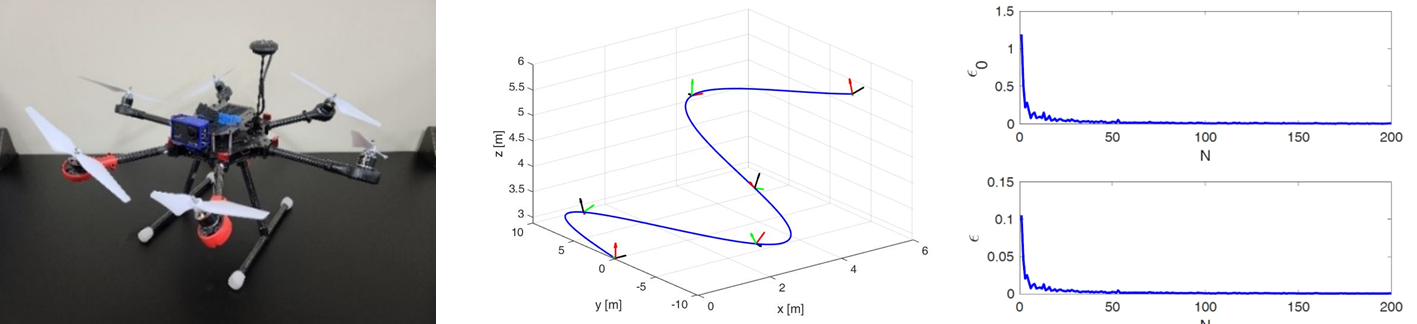
[Distributed Optimal Control of Hexarotor: Stackelberg Game Approach]
Applied partially observed mean-field Stackelberg game theory for leader-follower distributed optimal flight control of large-scale hexarotor groups
Reinforcement Learning and Machine Learning Theory and Applications
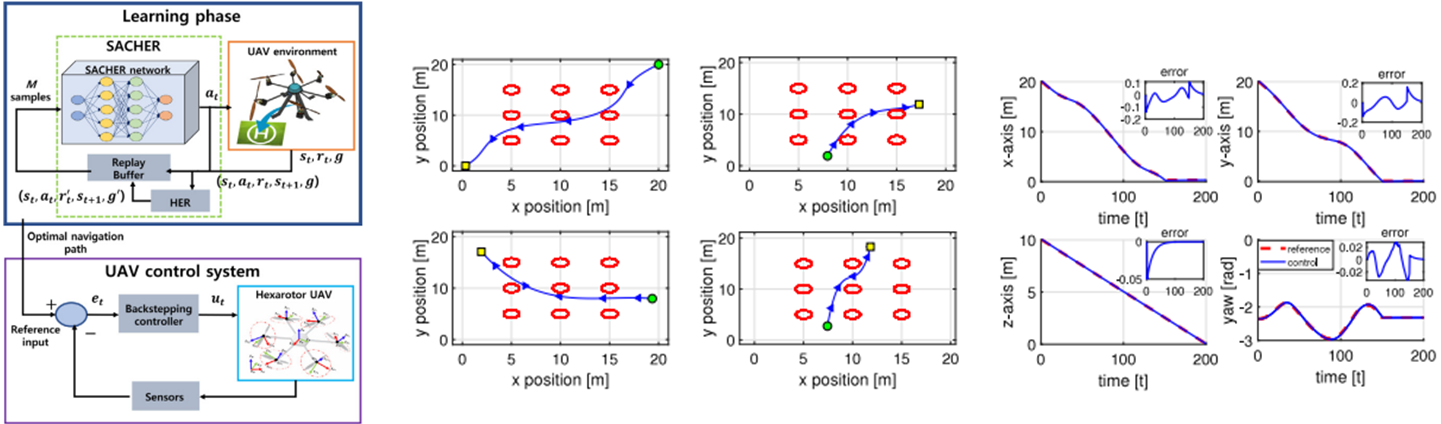
[Reinforcement Learning-Based SACHER Algorithm for UAV Path Planning and Collision Avoidance]

[Reinforcement Learning-Based Active Management of Power Systems and Emergency Load Shedding Control]

[Single-Policy-Based Multi-Objective Reinforcement Learning: Maximum Norm Minimization Method for Expanding the Pareto Front]
Autonomous Driving and Intelligent Robot Control

Research and Implementation of Intelligent Control Algorithms Based on Various Robot Platforms

Development and Validation of Autonomous Driving Algorithms for ERP-42 Vehicle Using Various Sensor Fusion Technologies